
{kind=link}
{kind=link}
What’s the Difference Between ToF and USW?
(2 minute read, for internal use only, optimized for viewing on a smartphone)
Time-of-flight is an umbrella term for a type of technology that measures the time it takes for something (laser, light, liquid, or gas particle) to travel a certain distance. In the case of ToF cameras, distance is calculated by measuring the duration it takes for a light signal to fire, reflect off an object, and return to the imaging sensor. The technology has gained a lot of popularity in the last ten years as the processing speed and power consumption has reached optimal levels for deployment in everyday gadgets. ToF is currently used in drones, self-driving cars, VR gaming, industrial robots, and most recently, smartphones.
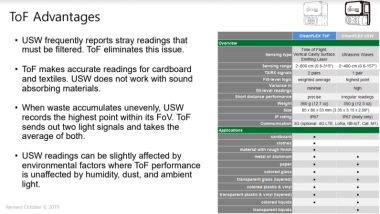
Our current CleanFLEX uses ultrasonic sound waves (USW) to measure waste fill-levels. The new ToF CleanFLEX will use light (more specifically VCSEL = Vertical Cavity Surface Emitting Laser; module KMED103C). The ToF overcomes various drawbacks of USW. Our USW sensors occasionally reported irregular distance data when detecting waste fill-levels (evidenced by raw data randomly showing 999 on ERP which our fill-level algorithm filtered out). This may have been due to USW’s vulnerability to environmental factors such as humidity and dust. ToF is unaffected by such influences and produces consistent readings with little to no variance, even when ambient light is present. Another shortcoming of USW was that it could not provide accurate readings for materials that absorb sound such as textiles and cardboard. Since ToF uses light instead of sound, it suffers no such limitation.
In addition, ToF features faster, more reliable readings than USW and covers a greater distance (ToF 2-800cm vs USW 2-400cm). Lastly the ToF CleanFLEX will emit two beams of concentrated light compared to the one projection of sound from USW. When a large container has waste accumulating unevenly the USW CleanFLEX returns the highest point of the waste mound within its FoV, often resulting in overestimated fill levels. The ToF will measure the level at two separate points and take the average, leading to a greater likelihood of more accurate fill-levels. Lastly, the ToF CleanFLEX will feature a glass or acrylic cover for sensor openings. We expect this to make it less susceptible to corrosion and rust from water and humidity.
Both sensors do share some similarities. USW and ToF can both measure fill-levels to an accuracy of 1cm. Both feature a small profile, low weight, and low power consumption (it remains to be seen if ToF will produce comparable battery life). Both operate in sunlight or dark and are safe (USW for human ears, ToF for human eyes). One scenario in which the USW will be preferable over ToF is for transparent liquids. Since ToF uses light, the light beam will likely penetrate past transparent liquids resulting in false measurements. The same can be said of transparent glass, plastics and vinyl bags but ToF performs fine when such materials accumulate in layers on top of one another. For most contexts, we expect the ToF CleanFLEX to outperform USW and help raise the satisfaction of our customers.
Written by Christian Lee (Oct 2019)